import matplotlib
if not hasattr(matplotlib.RcParams, "_get"):
matplotlib.RcParams._get = dict.get
Implementation#
In this notebook you will continue to implement the matrix method and check it with some sanity checks.
Exercise (0)
Check whether your implementation of last week was correct using the provided solution
import matplotlib as plt
import numpy as np
sys.path.insert(1, '/matrixmethod_solution')
import matrixmethod_solution as mm
%config InlineBackend.figure_formats = ['svg']
import numpy as np
import matplotlib as plt
import matrixmethod as mm
%config InlineBackend.figure_formats = ['svg']
%load_ext autoreload
%autoreload 2
1. The Node class#
The Node class from last week is unchanged and complete
2. The Element class#
The implementation is incomplete:
The function
add_distributed_loadshould compute the equivalent load vector for a constant load \(q\) in \(\bar x\) and \(\bar z\) direction (we’ll ignore a distributed moment load now) and moves those loads to the nodes belonging to the element. Remember to use theadd_loadfunction of theNodeclass to store the equivalent loads (remember we have two nodes per element). Also keep local/global transformations in mind and storeself.q = qfor later use;The function
bending_momentsreceives the nodal displacements of the element in the global coordinate system (u_global) and uses it to compute the value of the bending moment atnum_pointsequally-spaced points along the element length. Keep local/global transformations in mind and use the ODE approach in SymPy / Maple / pen and paper to compute an expression for \(M\). Do the same for for \(w\) in the functionfull_displacement.
Exercise (Workshop 2 - 2.1)
Add the missing pieces to the code, before you perform the checks below.
Solution
For the code implementations see ./matrixmethod/elements.py:
Having made your implementations, it is now time to verify the first addition of your code with a simple sanity check. We would like to solve the following simply-supported beam:
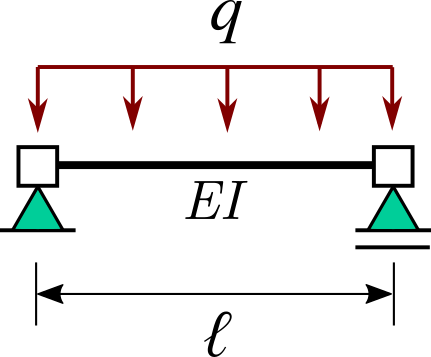
Choose appropriate values yourself.
Exercise (Workshop 2 - 2.2)
Use the code blocks below to set up this problem. After you’ve added the load, print the element using print(YOUR ELEMENT). Do the shown values for the nodal loads correspond with what you’d expect?
#YOUR CODE HERE
print(#YOUR ELEMENT HERE
Solution to Exercise (Workshop 2 - 2.2)
EI = 1000
q = 10
L = 1
mm.Node.clear()
mm.Element.clear()
node1 = mm.Node (0,0)
node2 = mm.Node (L,0)
elem = mm.Element ( node1, node2 )
section = {}
section['EI'] = EI
elem.set_section (section)
elem.add_distributed_load([0,10])
print(elem)
Element connecting:
node #1:
This node has:
- x coordinate=0,
- z coordinate=0,
- degrees of freedom=[0, 1, 2],
- load vector=[ 0. 5. -0.83333333]
with node #2:
This node has:
- x coordinate=1,
- z coordinate=0,
- degrees of freedom=[3, 4, 5],
- load vector=[0. 5. 0.83333333]
The vertical forces correspond to the solution from Element loads \(\cfrac{1}{2}qL=\cfrac{1}{2}\cdot 10 \cdot 1=5\)
The moments correspond to the solution from Element loads \(\cfrac{1}{12}qL^2=\cfrac{1}{12}\cdot 10 \cdot 1^2 \approx 0.833\)
Exercise (Workshop 2 - 2.3)
Now solve the nodal displacements. Once you are done, compare the rotation at the right end of the beam. Does it match a solution you already know?
#YOUR CODE HERE
Solution to Exercise (Workshop 2 - 2.3)
con = mm.Constrainer()
con.fix_dof (node1,0)
con.fix_dof (node1,1)
con.fix_dof (node2,1)
print(con)
global_k = elem.stiffness()
global_f = np.zeros (6)
global_f[0:3] = node1.p
global_f[3:6] = node2.p
Kc, Fc = con.constrain ( global_k, global_f )
u_free = np.matmul ( np.linalg.inv(Kc), Fc )
print(u_free)
This constrainer has constrained the degrees of freedom: [0, 1, 4] with corresponding constrained values: [0, 0, 0])
[-0.00041667 0. 0.00041667]
The rotations corresponds with the forget-me-not solution \(\cfrac{qL^3}{24\cdot EI} = \cfrac{10 \cdot 1^3}{24\cdot 1000} \approx 0.0004166\)
Exercise (Workshop 2 - 2.4)
Calculate the bending moment at midspan and plot the moment distribution using plot_moment_diagram. Do the values and shape match with what you’d expect?
u_elem = con.full_disp(#YOUR CODE HERE)
#YOUR CODE HERE
Solution to Exercise (Workshop 2 - 2.4)
u_elem = con.full_disp(u_free)[elem.global_dofs()] #keep this line
moments = elem.bending_moments(u_elem,3)
print(moments)
elem.plot_moment_diagram(u_elem,num_points=51)
[-1.48029737e-16 1.25000000e+00 -1.48029737e-16]

The moment corresponds with the well known solution \(\cfrac{1}{8}qL^2=\cfrac{1}{8}\cdot 10 \cdot 1^2 = 1.25\)
The shape is parabolic, as expected.
Exercise (Workshop 2 - 2.5)
Calculate the deflection at midspan and plot the deflected structure using plot_displaced. Do the values and shape match with what you’d expect?
#YOUR CODE HERE
Solution to Exercise (Workshop 2 - 2.5)
deflections = elem.full_displacement(u_elem,3)
print(deflections)
elem.plot_displaced(u_elem,num_points=51,global_c=False)
(array([0., 0., 0.]), array([0. , 0.00013021, 0. ]))

The deflection corresponds with the forget-me-not solution \(\cfrac{5}{384} \cfrac{qL^4}{EI}=\cfrac{5}{384} \cfrac{10 \cdot 1^4}{1000} \approx 0.0001302\)
The shape of the deflection is a 4th order polynomial, as expected.
3. The Constrainer class#
We’re going to expand our Constrainer class, but the implementation is incomplete:
The constrainer class should be able to handle non-zero boundary conditions too.
constrainshould be adapted to do so + the docstring of the class itself. Furthermore, the assert statement offix_dofshould be removed.The function
support_reactionsis incomplete. Since the constrainer is always first going to getconstraincalled, here we already have access toself.free_dofs. Together withself.cons_dofs, you should have all you need to compute reactions. Note thatfis also passed as argument. Make sure you take into account the contribution of equivalent element loads that go directly into the supports without deforming the structure.
Exercise (Workshop 2 - 3.1)
Add the missing pieces to the code and docstring, before you perform the checks below.
Solution
For the code implementations see ./matrixmethod/constrainer.py:
We’re going to verify our implementation. Therefore, we’re going to solve an extension bar, supported at both ends, with a load \(q\).
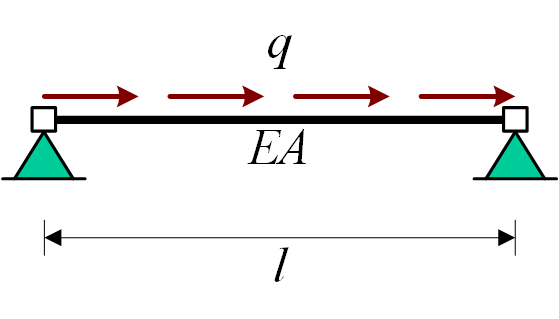
Choose appropriate values yourself.
Exercise (Workshop 2 - 3.2)
Can you say on beforehand what will be the displacements? And what will be the support reactions?
Use the code blocks below to set up and solve this problem and check the required quantities to make sure your implementation is correct.
#YOUR CODE HERE
Solution to Exercise (Workshop 2 - 3.2)
The displacements will be zero, as everything is fixed
The support reactions should be each \(\cfrac{1}{2}qL = \cfrac{1}{2}\cdot 10 \cdot 1 = 5\) to the left
EA = 1000
q = 10
L = 1
mm.Node.clear()
mm.Element.clear()
node1 = mm.Node (0,0)
node2 = mm.Node (L,0)
elem = mm.Element ( node1, node2 )
section = {}
section['EA'] = EA
elem.set_section (section)
elem.add_distributed_load([q,0])
print(elem)
con = mm.Constrainer()
con.fix_node (node1)
con.fix_node (node2)
print(con)
global_k = elem.stiffness()
global_f = np.zeros (6)
global_f[0:3] = node1.p
global_f[3:6] = node2.p
Kc, Fc = con.constrain ( global_k, global_f )
u_free = np.matmul ( np.linalg.inv(Kc), Fc )
print(u_free)
print(con.support_reactions(global_k,u_free,global_f))
Element connecting:
node #1:
This node has:
- x coordinate=0,
- z coordinate=0,
- degrees of freedom=[0, 1, 2],
- load vector=[5. 0. 0.]
with node #2:
This node has:
- x coordinate=1,
- z coordinate=0,
- degrees of freedom=[3, 4, 5],
- load vector=[5. 0. 0.]
This constrainer has constrained the degrees of freedom: [0, 1, 2, 3, 4, 5] with corresponding constrained values: [0, 0, 0, 0, 0, 0])
[]
[-5. 0. 0. -5. 0. 0.]
Again, we’re going to verify our implementation. Therefore, we’re going solve a beam, with a load \(F\) and support displacement \(\bar w\) for the right support.
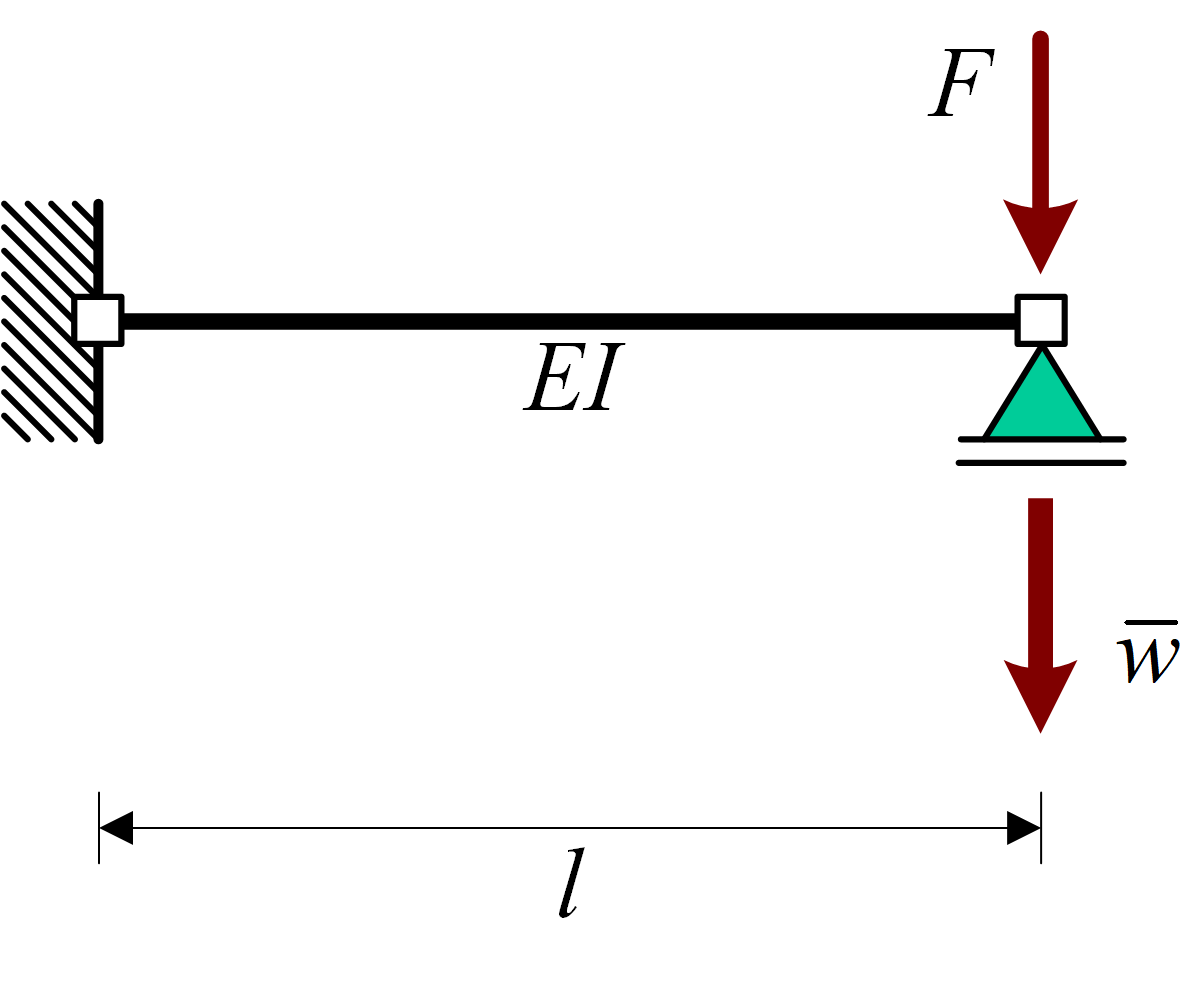
Choose appropriate values yourself.
Exercise (Workshop 2 - 3.3)
Use the code blocks below to set up and solve this problem and check the required quantities to make sure your implementation is correct.
#YOUR CODE HERE
Solution to Exercise (Workshop 2 - 3.3)
EI = 1000
F = 10
L = 1
w_B = 0.1
mm.Node.clear()
mm.Element.clear()
node1 = mm.Node (0,0)
node2 = mm.Node (L,0)
node2.add_load([0,F,0])
elem = mm.Element ( node1, node2 )
section = {}
section['EI'] = EI
elem.set_section (section)
print(elem)
con = mm.Constrainer()
con.fix_node (node1)
con.fix_dof (node2,1,w_B)
print(con)
global_k = elem.stiffness()
global_f = np.zeros (6)
global_f[0:3] = node1.p
global_f[3:6] = node2.p
Kc, Fc = con.constrain ( global_k, global_f )
u_free = np.matmul ( np.linalg.inv(Kc), Fc )
print(u_free)
print(con.support_reactions(global_k,u_free,global_f))
Element connecting:
node #1:
This node has:
- x coordinate=0,
- z coordinate=0,
- degrees of freedom=[0, 1, 2],
- load vector=[0. 0. 0.]
with node #2:
This node has:
- x coordinate=1,
- z coordinate=0,
- degrees of freedom=[3, 4, 5],
- load vector=[ 0. 10. 0.]
This constrainer has constrained the degrees of freedom: [0, 1, 2, 4] with corresponding constrained values: [0, 0, 0, 0.1])
[ 0. -0.15]
[ 0. -300. 300. 290.]
The rotation at B corresponds with the forget-me-not solution \(\cfrac{3}{2} \cfrac{w_B}{L}=\cfrac{3}{2} \cdot \cfrac{0.1}{1} = 0.15\)
The moment at A corresponds with the ODE solution of \(\cfrac{3 EI}{L^2 w_B}=\cfrac{3 \cdot 1000}{1^2 \cdot 0.1} = 300\)
The vertical support reaction at A corresponds with the ODE solution of \(\cfrac{3 EI}{L^3 w_B}=\cfrac{3 \cdot 1000}{1^3 \cdot 0.1} = 300\)
The vertical support reaction at B corresponds with the ODE solution of \(\cfrac{3 EI}{L^3 w_B}=\cfrac{3 \cdot 1000}{1^3 \cdot 0.1} = 300\) minus the load \(F = 10\). The \(10\) and \(290\) together are equal to the reaction force of \(300\)
u_elem = con.full_disp(u_free)[elem.global_dofs()]
elem.plot_moment_diagram(u_elem,num_points=51)

deflections = elem.full_displacement(u_elem,3)
elem.plot_displaced(u_elem,num_points=51,global_c=False)

The moment line and displacement line look as expected.