Macaulay’s methode is een variatie op de directe integratie methode om het krachtverloop
en de vervorming van een constructie te berekenen. Bij deze methode worden zogeheten
singulariteitsfuncties gebruikt om de belasting op constructie met een enkele vergelijking
te kunnen beschrijven. Dit heeft als gevolg dat het aantal integratieconstanten laag blijft,
wat het oplossen van de constructie minder intensief maakt. Er is echter nog niet beschre-
ven hoe deze methode toegepast kan worden op constructies met variërende stijfheden.
Gebruikelijk worden delen van de constructie met verschillende stijfheidssituaties apart
beschreven. Dit is echter niet in lijn met het idee van Macaulay’s methode om de gehele
constructie met één vergelijking te beschrijven. Daarom wordt in dit rapport onderzoek
gedaan naar de volgende vraag:
“Hoe kan de methode van Macaulay toegepast worden op constructies waarbij de stijfheid
varieert over de lengte?”
Vanuit de definitie van de kromming is gevonden dat een verandering in stijfheid hetzelfde
effect heeft als een inverse verandering van het moment. Voor de kromming geldt \( \kappa = \cfrac{M}{EI}\).
Een verdubbeling van de stijfheid geeft hetzelfde effect als een halvering van het moment.
Hieruit volgt een methode waarbij het effect van belastingen wordt geïntroduceerd in
de krommingsvergelijking om het effect van de variërende stijfheid te simuleren. Deze
belastingen zijn virtueel genoemd.
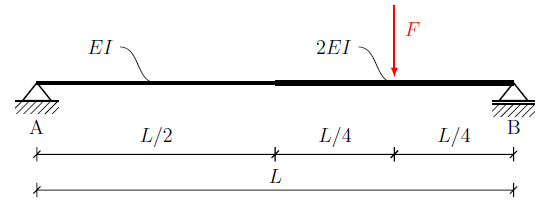
Een sprong in stijfheid kan gesimuleerd worden met een virtuele puntlast en een virtueel
koppel ter plaatse van de sprong. De waarde van deze virtuele belastingen dienen respectievelijk de waarden van de dwarskracht en het moment op dit punt in de constructie te
zijn, vermenigvuldigd met de gevonden sprongfactor:
\(EI_1\) = buigstijfheid van de balk voor de sprong \(\left[\rm{kNm}^2\right]\)
\(EI_2\) = buigstijfheid van de balk na de sprong \(\left[\rm{kNm}^2\right]\)
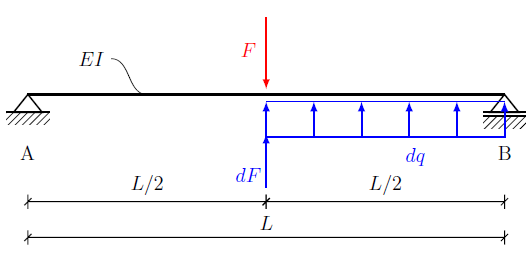
Wanneer belastingen zich op een punt bevinden met een hogere x-coördinaat dan de de
sprong in stijfheid, dienen ze direct op het moment van optreden gecompenseerd te worden
met een virtuele belastingen van dezelfde waarde als deze belasting, vermenigvuldigd met
de sprongfactor. In het geval van een q-last na de sprong, moet er ook een virtuele q-last
toegepast worden om deze te compenseren.
De oplossing van een constructie waarbij de stijfheid een sprong maakt, komt er zo als
volgt uit te zien:
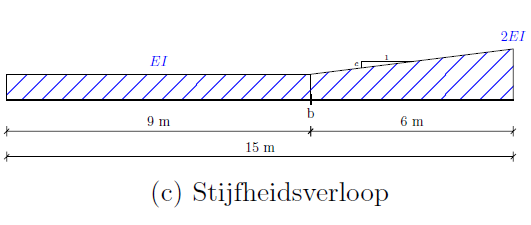
Hetzelfde is mogelijk voor constructies met een lineair stijfheidsverloop dat een knik
maakt. Hierbij zijn de virtuele belastingen die toegepast dienen te worden een q-last
en een puntlast. De waarden hiervan zijn wederom respectievelijk het moment en de
dwarskracht op het punt van de knik. Ditmaal worden deze waarden vermenigvuldigd
met de knikfactor:
Ten slotte is deze methode ook toepasbaar op constructies die belast worden op nor-
maalkracht. In dit geval hoeft enkel de normaalkracht virtueel aangepast te worden. In
tegenstelling tot het geval voor buiging waar zowel de dwarskracht als het moment aan-
gepast worden. Dit geval is dus relatief eenvoudiger dan dat voor buiging. In het geval
van een sprong in axiale stijfheid wordt een virtuele puntlast toegepast op het punt van
de sprong. In het geval van een knik in lineaire axiale stijfheid is dit een q-last vanaf het
punt van de sprong.